プログラミング教室「プロラボ唐津」では、ロボットを使ったプログラミング教育を行っています。
使用しているプログラミングロボットは、「クムクム」です。
今回は、こちらのクムクムロボットを使った歩かせる方法にスポットを当てて、解説していきます。
まずは、こちらをご覧ください。
クムクムロボットが歩いていますよね?
これ実は、歩かせるのって結構難しいです。
プログラムが英語表記になっていますが、歩く部分だけのプログラミングの中身は、
- 右足を上にあげる
- 右足を前にだす
- 右足を下におろす
- 左足を上にあげる
- 左足を前にだす
- 左足を下におろす
となっています。
この流れは、人間でも同じですよね。
こちらは、子供たちがイメージしやすいように、人間の歩く動作と同じにしようという開発者側の意図があります。
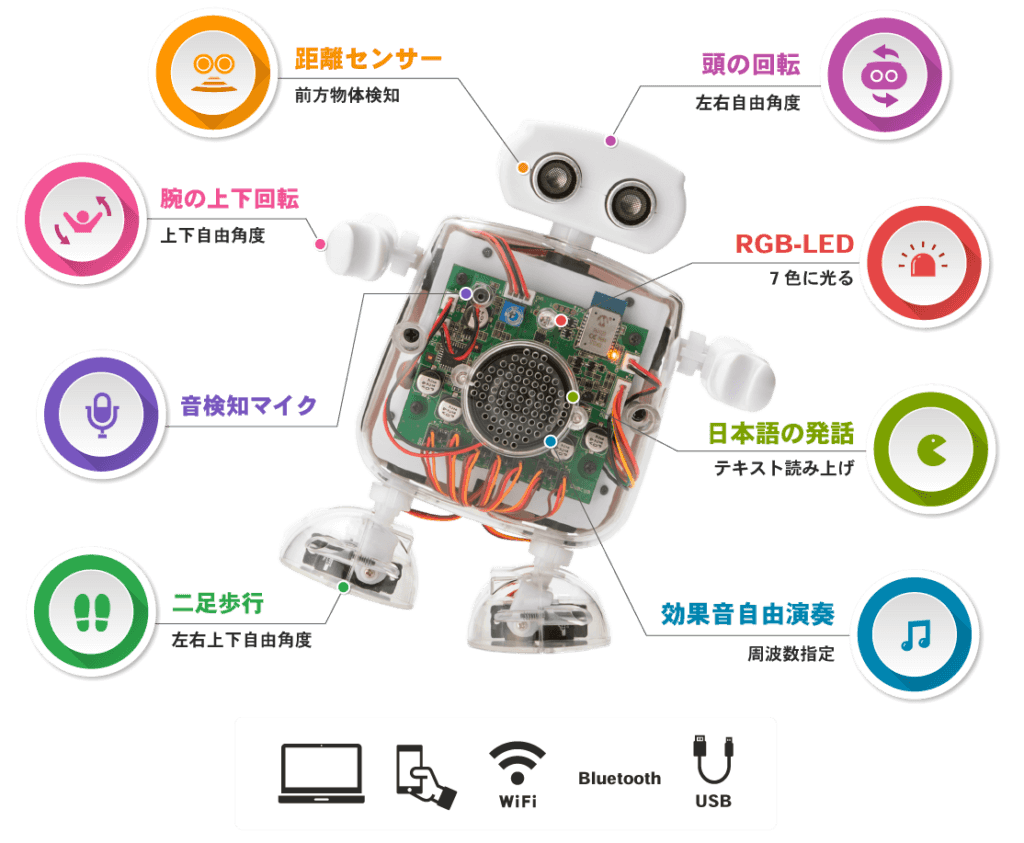
人間と同じような動作を命令することで歩いていますが、実際に動かしているのは、クムクムロボットのモーターです。
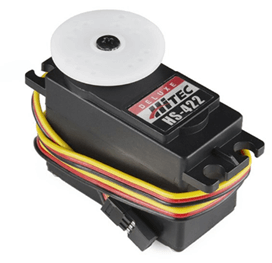
こちらのモーターが、クムクムロボットには、7個ついています。
モーターの制御は、基本的に角度を指定します。
角度や複数のモーターの組み合わせで歩かせるのですが、この歩くという動作を作るのがとても難しく、子供たちでも簡単に歩くことができるよう、分かりやすいブロックを開発側が用意しているというわけです。
例えば、「FOOT-R UP」というブロックは、「右足を上にあげる」というブロックですが、実際のモーターの動きは、「右足を上にあげる」といいつつも、右足と左足のモーターが違う角度で動いています。
これは、クムクムロボットを持ち上げた状態で、足の動きを確認すればすぐ分かりますが、そういう細かい制御をしないと、歩かせるのって本当に難しいんです。
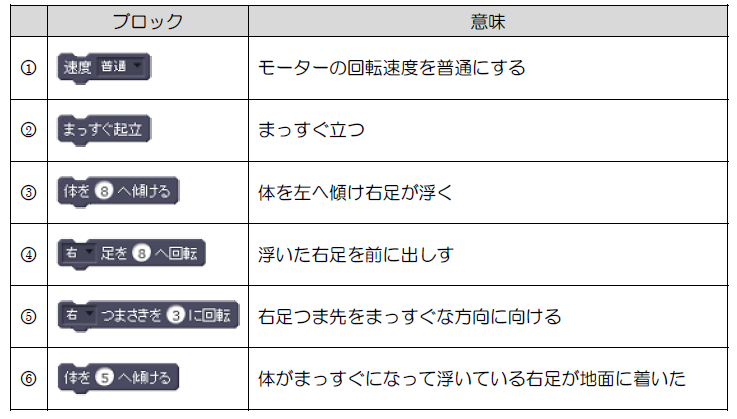
こちらは、初期のころのブロックです。
この時は、「体の傾き」「足の回転」「つまさきの回転」という表現で、プログラミングしていましたが、これはこれで、歩かせるのが大変でした。
傾けすぎて、倒れることも、、、

他にも、こんな簡単なブロックにしてみたり。
現在の形のブロックになるまで、試行錯誤の連続です。
色々なサービスを利用しているエンドユーザーは、単に便利だという感覚しか持っていませんが、開発者側の見えない努力がそこにはあります。
プログラミングの世界でも、ユーザーに便利だと感じてもらうため、使いやすさ、面白さなども考えてプログラミングしていきます。
プログラミング教室「プロラボ唐津」では、子供たちに、そういう作る側の苦労も教えながら、楽しく学べるよう、教育をしていきます。
